岡大、自律制御型水中ロボットの嵌合実験に成功 - 海中自動充電が可能に
同成果は同大大学院自然科学研究科(工)の見浪護 教授の研究グループと広和によるもの。
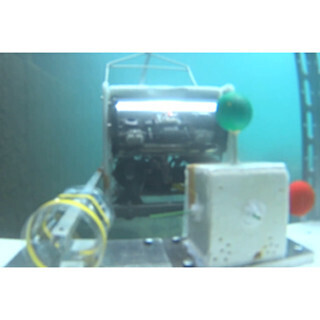
ももたろう岡大1号は従来型の遠隔操作型水中ロボット(ROV)に、複眼カメラと3D-MoS制御知能を搭載した長時間潜行/作業対応自立制御型水中ロボット。複眼動画像に対する実時間認識、水中対象物の3次元位置・姿勢自動認識、海底での自動充電、移動対象物の追尾制御を可能とする3D-MoS制御技術により、自動制御化を実現している。
同研究グループは、2015年12月に和歌山県の実海域(水深4~5mの港内)での嵌合実験を実施。海流と波による振動を3D-MoS技術で抑制することで自動嵌合に成功した。
今後、3D-MoS技術を搭載したロボットの開発が進めば、自動給電による長時間の自律化連続運転作業が行えることから、水中放射線汚染物の回収や深海底資源探査、機雷撤去などへの利用が期待される。
提供元の記事
提供: