
ispaceとジグソー、宇宙空間での資源調査に向け自律制御ロボットの共同研究
群ロボットとは、自律的に動く多数のロボットから構成されるロボットシステムで、ロボット自身が、ほかのロボットとの距離や速度を判断しながら移動する機能を持っている。
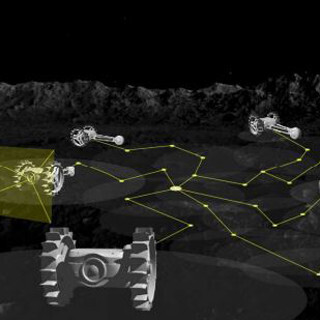
複数の小型探査ロボットを分散させて協調制御を行う分散協調型の宇宙探査システムは、複数ロボットの分散による探査領域の広域化、センシング、通信、運搬、マッピング、カメラなどの機能分散による探査システムの多機能化、個体トラブルなどの際の探査システムのリスク分散化といったメリットがある。
今回開発される宇宙群ロボットは、特に月面水資源調査での利用が最重視されており、ispaceが2018年~2023年にかけて実施予定の月面資源探査において実運用が予定されている。
両社は国内外の研究機関や関連団体とともに開発を進め、2017年初頭までに初期稼動モデルを完成させる予定であるとしている。
この記事もおすすめ

提供元の記事
提供:




