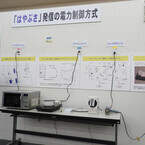
宇宙航空研究開発機構(JAXA)は1月26日、小惑星探査機「はやぶさ」で培った電力制御技術を活用した「デマンドコントローラ(デマコン)」のデモンストレーションを公開した。「はやぶさ」では宇宙機として初めて電力のピークカット技術が導入されていた。JAXAは同技術をエネルギーマネジメントシステム(EMS)に活用する取り組みを進めており、今回の技術開発はその流れを汲むものとなる。デマコンとは、同時に使用されている機器の消費電力を監視し、設定された規制値を超過しないように警告や自動警告を行う装置のこと。従来のデマコンは、基本的に事業所向けで、あらかじめ決められた優先度に従って、電気の遮断・停止、削減を行う機能に限定されている。優先度を収集して、デマンド削減の指令を与えるためには双方向の通信が必要なためシステムが複雑化するほか、機器によってはインバーター化されていない場合があり、きめ細かい調整能力を得ることができない。これに対し、今回の技術は、変動する個々の機器での優先度に対しても、サーバーを要さずにきめ細かい電力の割り付けを可能とするもので、事業所だけでなく家庭でも高機能なデマコンの導入を可能とし、電気料金の低減・エコなどのメリットがある。○一方向の通信のみで機器を制御JAXAは今回、家庭向けと事業所向けソリューションのデモを実施した。家庭向けソリューションは、全体の電力消費量を監視するセンシングモジュール、その情報を各機器に展開するメディアコンバーター、メディアコンバーターから情報を受け取るスマートブレーカーという構成になっている。仕組みとしては、設定した規制電力を超過したときに、センシングモジュールがどれくらい超過しているのかという情報をメディアコンバーター経由で各機器が接続されているスマートブレーカーに送信する。各スマートブレーカーは送られてきた情報をもとに並列処理を開始し、その時点で一番電力を消費しているコンセントが切れる。例えば、電圧が100Vの住戸で使用可能電力が10Aに設定されている時に、800Wを消費するIHクッカーと600Wを消費するドライヤーを同時に使用した場合、合計消費電力は1400W(14A)となり上限値を超過してしまう。そうすると、各スマートタップが並列処理を開始し、より電力を消費しているIHクッカーが自動的に切れるというわけだ。このソリューションでは、機器を切るべきかどうかは各スマートブレーカーが判断するため双方向の通信が必要ない。また、スマートブレーカーを付け替えるだけで電力制御の対象とする機器を変更することができるほか、既存のコンセントと混在していても運用が可能なため、各家庭ごとの家電製品の使用状況に柔軟に対応することができる。一方、事業所向けソリューションはエアコンの電力制御にフォーカス。仕組みとしては家庭向けと基本的には同じで、センシングモジュール、メディアコンバーター、レシーバーモジュールを用いる。デモでは、業務用エアコンにレシーバーモジュールを取り付けることで、消費電力が設定値を超えた時にエアコンが自動で電力削減モードへ切り替わるようになっていた。同ソリューションは電力制御機能のほか、既存の機器をほとんど改造すること無く導入可能であるため、導入経費が低く済むこともメリットであり、販売に向けてJAXAは家庭用は6-8年、事業所用では数年で元が取れるような末端価格を目指したいとしている。
2016年01月28日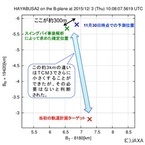
宇宙航空研究開発機構(JAXA)は12月24日、小惑星探査機「はやぶさ2」が同月3日に実施した地球スイングバイについて、結果の詳細を報告した。すでに、地球スイングバイが成功だったことは14日のプレスリリースで公表されていたが、今回、誤差300mという高い精度で軌道誘導できていたことなどが明らかになった。地球スイングバイは、地球の重力と公転を利用して、探査機を加速/減速させる技術である。燃料を使わずに加速/減速できるというメリットがあるが、目的の軌道に乗せるためには、極めて正確に探査機を誘導して、正しいルートを飛ばす必要がある。進入時の誤差が大きいと、軌道の誤差が大きくなり、修正のための燃料消費量が増えてしまう。はやぶさ2は、化学エンジン(RCS)を使った軌道修正を2回実施した。1回目(TCM1)は11月3日で、噴射時間は合計3.95秒。これで軌道の誤差を400kmから11kmへと縮小させた。さらに、11月26日の2回目(TCM2)で0.80秒の噴射を行い、この結果、誤差は11kmから3kmまで小さくなった。TCM1に先立ち、9月1日~2日には、イオンエンジンを使った軌道修正(IES-TCM)も実施していた。ここでイオンエンジンを使ったのは、RCSの燃料消費を少しでも抑えるためだ。RCSは小惑星に到着後、タッチダウンなどで使用する。未踏の小惑星では、何が起こるか分からない。燃料さえあれば自由度は増すので、少しでも節約しておきたいのだ。JAXAは当初、12月1日に3回目(TCM3)を実施する予定であったが、11月30日に軌道を推定したところ、TCM2までで十分な精度を達成できたことが分かり、TCM3はキャンセル。津田雄一・はやぶさ2プロジェクトマネージャによれば、「30km以内なら成功と見ていた」とのことで、3kmの誤差であれば、イオンエンジンの燃料消費もほとんど増えない。TCM3をキャンセルしたことで、JAXAは誘導目標点を変更、当初の的の中心から、3km離れたTCM2後の予測点を新ターゲットに設定した。スイングバイ後に軌道を正確に解析したところ、実際にはやぶさ2が通過したのは、そこから300mほど離れた地点だった。これにより、JAXAは「最終的な軌道誘導精度は300mだった」と結論付けた。「当初の目標地点から3km離れているんだから、軌道誘導の精度は3kmでは?」と思うかもしれないが、もし12月1日にTCM3を実施していたら、ほぼ同程度の精度で、的の中心近くを通過することが可能だったと見られている。上記の「精度は300m」には、そういう意味があるのだ。本来は30kmの精度でも良かったので、地球スイングバイだけを考えれば、そこまで高い精度を狙う必要は無かった。しかし地球帰還時、大切な小惑星のサンプルが入ったカプセルを分離するときには、やはり高い精度の軌道誘導が必要になる。今回は、そのリハーサルとしても考えられており、十分な能力があることを実証できた形だ。また、地球スイングバイの前後には、はやぶさ2に搭載された観測機器による試験撮影なども行われた。宇宙空間を航行中は、何を撮影しても点にしかならないのだが、地球や月を近くから撮影すれば、機器の健全性を確認できる。地球スイングバイは、小惑星到着前にそれができる、唯一の貴重な機会でもある。はやぶさ2は基本的に、太陽電池パドルを太陽に向けた「巡航姿勢」で飛行している。一方、観測機器の多くは底面側に配置されているため、地球を観測するためには底面側を地球に向けた「観測姿勢」にする必要がある。スイングバイ前は、両者の差が大きく、かなり姿勢を振らないといけなかったが、日々姿勢を切り替えることで対応した。この姿勢制御には、リアクションホイールとRCSを併用した。RCSでは偶力噴射を行うことで、軌道は変えずに姿勢だけを変えるようにするが、スラスタにバラツキがあるため、どうしても横方向の微小な推力が発生してしまう。これが軌道の誤差の原因になるため、軌道への影響を評価しながら慎重に運用を行ったという。スイングバイ後は、巡航姿勢との差が小さくなるため、観測姿勢を維持しながら、観測に注力。そして12月22日に巡航姿勢に戻し、一連のスイングバイ運用を完了した。この結果、4つ全ての観測機器に対し、問題無いことが確認できた。今後は、いよいよ小惑星リュウグウへ向け、イオンエンジンの本格的な運転が開始されることになる。今までの稼働時間は累計600時間程度だが、これからは約7,000時間(約292日分)も動かさないと、リュウグウに到着することができない。津田プロマネは「緊張を強いられる運用になる」と、今から気を引き締めた。初号機では、イオンエンジンやリアクションホイールに不具合が出てしまったが、今のところ、はやぶさ2の機器は全て順調だ。イオンエンジンの運転は2016年3月~4月から開始する予定で、津田プロマネは「我々には初号機の経験があるものの、はやぶさ2もまだ挑戦。日々起きることをハラハラドキドキしながら見守って欲しい」と呼びかけた。
2015年12月25日
宇宙航空研究開発機構(JAXA)は12月14日、2015年12月3日の夕方から夜にかけて実施した地球スイングバイの後の小惑星探査機「はやぶさ2」の軌道の計測と計算を行った結果、軌道は約80°曲がり、速度も約1.6km/s上がり、約31.9km/s(太陽に対する速度)となり、目標としていた数値を達成したことを確認したと発表した。またはやぶさ2は、スイングバイ後に搭載している光学航法カメラを用いて、地球中心から約34万kmの距離で地球をカラー撮影することにも成功したという。今回のスイングバイの実施を受け、津田プロジェクトマネージャは、「すべての関係者の皆様、運用を見守っていただいた皆様に、感謝申し上げます。「はやぶさ2」に携わるメンバー全員力を合わせ、挑戦の航行を続けます。小惑星探査機「はやぶさ2」はスイングバイにより軌道エネルギーを獲得し、これより地球を離れます。進路「Ryugu(リュウグウ)」。それでは地球の皆さん、行って参ります」とコメントしている。なお、12月14日0時(日本時間)時点のはやぶさ2は、地球から約415万km、太陽から約1億4485万km、巡航速度は秒速約32.31km(太陽に対する速度)となっており、スイングバイ後、太陽の重力の影響で加速している状態にあるという。
2015年12月14日
既報のように、宇宙航空研究開発機構(JAXA)の小惑星探査機「はやぶさ2」が12月3日19時8分、地球スイングバイを実施した。現時点で探査機の状態が健全であることは確認できており、JAXAは今後1週間程度かけて、計画通りの軌道に入れたかどうか確認するという。「地球スイングバイが成功したかどうか」に注目が集まるだろうが、今回は惑星周回軌道への投入などと違い、エンジンを噴射するイベントではないので、地球に接近する飛行経路さえ正しければ、探査機に何があっても物理法則通りに飛行する。そういう意味では、11月3日と26日に行った2回の軌道制御(TCM1/2)ですでに勝負は決まっている。おそらく注目すべきポイントとしては、今回、はやぶさ2が初めて日光が当たらない日陰に入るということだろう。はやぶさ2にとって電力は生命線。太陽電池パネルに日光が当たらないと発電できなくなってしまうため、はやぶさ2はリスクを避け、小惑星近傍でも日陰に入るような運用は行わない予定だ。はやぶさ2にとって発電できなくなるということは"異常事態"のため、通常、このようなときはセーフモードに入るような仕組みになっている。そのままだと地球スイングバイ中にこれが機能してしまうため、事前にそうした安全機能を無効化する必要があるという。いつもと違う設定で飛行する日陰を無事に乗り切れるか、懸念するとすればそこだ。地球スイングバイ後、記者会見に応じた吉川真・はやぶさ2ミッションマネージャによれば、はやぶさ2からの電波は、19時25分ころにNASAのキャンベラ局で受信。その後、探査機の姿勢、電源の状態、各部の温度などをチェックしていき、19時29分ころ、主要な装置に全て異常が無いことが確認できたとのこと。地球スイングバイで計画通りの軌道に入ったかどうかについては、前述のように今後1週間程度かけて確認する予定だが、物理法則通りに飛行するだけなので、「大外れすることは無いだろう」(吉川氏)と見られる。また今回、地球に接近するチャンスを利用して、はやぶさ2を観測するキャンペーンが行われたが、同日21時の段階で20件もの観測例が報告されている。吉川氏は「はやぶさ2はこれからリュウグウに向かう。多くの人が出発を見届けてくれたのは本当に嬉しい」と感謝を述べた。なお地球スイングバイ後に、津田雄一・はやぶさ2プロジェクトマネージャが寄せたコメントは以下の通り。「はやぶさ2は、計画通り、地球最近点を通過しました。地球スイングバイ後のはやぶさ2は元気そのものです。これで1つの山場を越えましたが、はやぶさ2にとっては、小さな山に過ぎません。これから一路リュウグウを目指して、挑戦の航法を進めてまいります。引き続き、太陽系の船旅を、皆様と苦楽を分かち合いながら、乗り越えて行ければと思っています」はやぶさ2関連記事・【速報】小惑星探査機「はやぶさ2」が地球に最接近・【レポート】「はやぶさ2」は12月3日19時7分に地球に最接近 - 日本からは観測のチャンスも・【レポート】小惑星探査機「はやぶさ2」の各部をチェック! - 初号機からはこう変わった・【レポート】「はやぶさ2」は浦島太郎? - 目指す小惑星の名前は「リュウグウ」・【レポート】はやぶさ2打ち上げ - 青空の中を飛び立った「はやぶさ2」、打ち上げを写真と動画で振り返る
2015年12月03日
宇宙航空研究開発機構(JAXA)は12月3日、小惑星探査機「はやぶさ2」が同日の夕方から夜にかけて地球スイングバイを実施し、19時08分に地球に最接近し、ハワイ諸島付近の太平洋上空約3090kmを通過したと発表した。発表によれば、アメリカ航空宇宙局(NASA)深宇宙ネットワーク局の支援を受けた探査機運用により、最接近後の探査機の状態は正常であることを確認したという。現在、はやぶさ2プロジェクトチームは地球スイングバイ後の「はやぶさ2」の軌道の計測と計算を行っており、同探査機が目標とする軌道に入れたかどうかの確認には1週間程度かかる見込みだという。
2015年12月03日
宇宙航空研究開発機構(JAXA)の小惑星探査機「はやぶさ2」が12月3日、地球スイングバイを実施した。地球への最接近は同日19時8分ころ。この地球スイングバイにより、計画通りの軌道に入れたかどうかは、今後の詳細な解析を待つ必要があるものの、今のところ機体の状態は健全で、特に問題は確認されていないようだ。はやぶさ2は地球スイングバイの前後20分程度、打ち上げてから初めての日陰に入る。19時18分ころ日陰を出て、それからNASAのキャンベラ局と通信を開始するため、無事に日陰を通過できたかどうかは、それ以降に分かることになる。ただ、この時点で分かるのは機体の状態だけで、軌道の確認には1週間程度かかる見込みだ。はやぶさ2はちょうど1年前の2014年12月3日に打ち上げられた。天体の引力と公転を利用して軌道を変えるスイングバイ航法により、速度を30.3km/sから31.9km/sへと1.6km/s増やし、目的地である小惑星リュウグウに向かう計画。そのため、これまでの1年間は、地球に近い軌道を飛行していた。はやぶさ2関連記事・【レポート】「はやぶさ2」は12月3日19時7分に地球に最接近 - 日本からは観測のチャンスも・【レポート】小惑星探査機「はやぶさ2」の各部をチェック! - 初号機からはこう変わった・小惑星探査機「はやぶさ2」の機体が完成 - JAXAが機体を公開(写真104枚)・【レポート】「はやぶさ2」は浦島太郎? - 目指す小惑星の名前は「リュウグウ」・【レポート】はやぶさ2打ち上げ - 青空の中を飛び立った「はやぶさ2」、打ち上げを写真と動画で振り返る
2015年12月03日
今年12月には、宇宙ファンにとって注目すべきイベントが2つある。小惑星探査機「はやぶさ2」の地球スイングバイ(12月3日)と、金星探査機「あかつき」の金星周回軌道投入(12月7日)である。特に「あかつき」は5年前に一度失敗しており、今回がラストチャンスとなる。なんとか成功して欲しいところだ。ところで、報道などではどうしても宇宙航空研究開発機構(JAXA)ばかりに注目が集まってしまうのだが、宇宙開発を陰で支えているのがメーカーである。この両探査機の製造を担当したメーカーはNEC。同社は、日本初の人工衛星「おおすみ」以来、多くの衛星・探査機を手がけてきたメーカーだ。NEC側で、「はやぶさ2」と「あかつき」のプロジェクトマネージャを務めているのは、宇宙システム事業部プロジェクト推進部の大島武氏(49歳)。今回、大島氏に両探査機の状況や、プロジェクトマネージャの業務について、話を聞くことができた。あまり表に出てくることがない衛星メーカーの仕事というのは、どんなものだろうか。(※筆者の都合で掲載が遅くなりましたが、このインタビューは9月16日に行いました。発言は当時の状況にもとづいているので、2カ月ほどタイムスリップして読んでもらえれば幸いです。)○目指すのは「こんなこともあろうかと」が無い運用--両探査機のプロジェクトマネージャを兼務しています。2つのイベントが、たった4日しか離れていないのは大変そうですね。担当メンバーは一部重なっていますが、基本的に「はやぶさ2」の地球スイングバイは、事前に行う軌道決定と軌道の微調整が最も重要な運用で、スイングバイ前後は、地球に近づくチャンスを捉えた運用が主体となります。それに対して「あかつき」の運用は、当日の軌道制御運用が全てを決める最も重要な運用です。2つの探査機の運用は、イベントでの運用の性格がかなり異なるため、それぞれに適した人員で準備を行っています。「はやぶさ2」は地球スイングバイの後、小惑星とのランデブーに向け、イオンエンジンの運転率も上がりますので、その準備を入念に行います。一方、「あかつき」は今回のイベントが金星周回軌道への投入の唯一のチャンスであるため、このイベントに向けて集中的な準備をしています。--「あかつき」の軌道投入へ向け、現在はどんなことをやっているのでしょうか。金星到着までに軌道の微調整があり、これも非常に重要な運用です。ただ計画通りにいかないことがあったとしても、時間的には修正を行う余裕があります。やはりポイントとなるのは12月7日ですね。そのときにどういう運用をするのか、ということを検討しています。計画通りにいかない場合にどうやってリカバリするか、contingencyプラン(対応策)も考えています。様々なケースが考えられますので、作業量は正常ケースのみの検討に比べ、何倍にも増えていきます。--せっかく検討した様々なケースも、成功すればその努力は表には出てこないんですよね。日の目を見るのはトラブルが発生したときだけで。はい。ただこれは多かれ少なかれ、どのプロジェクトでも重要な運用に対しては必ずやっていることです。例えば衛星の場合は、打ち上げ直後の第一可視で何をやるか、いろいろなケースを想定して、それに対応したコマンド列を用意しておくとか。成功したら確かに表には出ませんが、それはむしろ望むところです。「備えをすればするほど、備えたことは何も起きない」とよく言われますし、そのような努力は、活用できる場面はあって欲しくないわけなので。--火星探査機「のぞみ」も「あかつき」も惑星周回軌道への投入に失敗。今回成功すれば日本初となりますが、やはり惑星探査は難しいですね。「はやぶさ2」のような小惑星ランデブー/タッチダウンと、惑星周回軌道への投入は、難しさの性質が大きく異なります。「はやぶさ2」のタッチダウンでは、何か問題があった場合でも、一度退避してやり直すことが可能ですが、多くのケースを想定した複雑な運用準備が必要となります。一方で、惑星周回軌道への投入は、時間的余裕が全く無いところで、確実に成功させなければならない。そこが難しいところです。--今の心境は。当日は緊張感があるでしょうが、今はまだ落ち着いて粛々と準備を進め、その日に備えたいと思っています。--ちなみに大島さんは前日には普通に寝られるタイプですか?寝られるタイプです。当日は寝たくても寝られないかも知れませんので。○メーカーのプロマネに求められる役割とは?--NECへの入社は1990年ですね。最初の仕事は何でしたか?JAXAの「宇宙実験・観測フリーフライヤ」(SFU)に搭載した「GDEF」(Gas Dynamics Experiment Facility)という装置の開発でした。ダイヤモンドは通常、高温高圧下で作られますが、微小重力下ではプラズマ低圧環境で薄膜ができます。実験は成功して、装置は、JAXAの若田光一宇宙飛行士により、スペースシャトルで回収されました。「GDEF」は、私が入社したときにはもう設計は大体終わっていました。私が設計から関わったのは、「のぞみ」や「LUNAR-A」(月探査機:2007年にプロジェクト中止)あたりですね。「のぞみ」では、観測装置などに組み込まれているCPUボード(SICPU)を開発しました。そのほかカメラ関係では、「のぞみ」の火星撮像カメラ(MIC)や「LUNAR-A」の月撮像カメラ(LIC)のデジタル系も担当しました。私は電子工学科出身で、会社ではデジタル系の部署にいたので、コンポーネント全体のまとめや、デジタル系の設計が主な仕事です。FPGAの中の回路設計も行っていました。地球周回中の「のぞみ」が、MICを使って地球と月の見事なツーショットを撮影した時には非常に感動しました。この写真は大きな話題になり、天文年鑑にも掲載されたのは良い記念になりました。ただ本当は火星を撮るためのカメラだったので、周回軌道に入って火星を撮れなかったことが残念です。--1996年には、「はやぶさ」初号機のシステムマネージャに就任していますね。入社してから6年間は機器担当でしたので、探査機システムについては分からないことも多くて大変でした。しかし、これはもともとやりたかった領域だったんです。いつかは探査機システム全体に関わりたいとずっと思っていました。--「あかつき」では最初システムマネージャで、2007年からはプロジェクトマネージャに。両マネージャの仕事の違いは?プロジェクトマネージャの仕事は、いわゆるQCD(品質、コスト、納期)の管理です。このQCDに密接に絡んでくるため仕様についても判断しますが、やはり大変なのはプロジェクトをうまく進めることですね。社内メンバーを動かしたり、JAXAと調整したり。技術的なところからは少し離れてしまうので、システムマネージャ的な仕事がしたくなる時もありますが、プロジェクトマネージャの方が自分の裁量でやれる範囲は広がります。--JAXAとメーカーの役割分担はどうなっているのでしょうか?実用衛星と科学衛星で違ったりもしますが、「はやぶさ」や「あかつき」のような場合では、JAXA宇宙科学研究所の先生方が、要求仕様を決めるだけでなく設計まで入り込んで、一緒に作り込んでいくスタイルで昔からやっています。JAXAが開発した技術でJAXAが知り尽くしているところ、逆にメーカーでないと分からないところなどが複雑に入り組んで存在しているので、密接にやりとりをしながら開発を進めていきます。「要求仕様を出したら後はメーカーで」というような、単純な進め方ではありません。ただ、最終的な「形」にするのはメーカー側なので、細部を詰めて設計製造するのはメーカーの仕事になります。--タフな交渉もありますか?かなり大胆な、意外性のある提案をされることもありますね。それとは逆に、こちらから提案することもあります。たとえば「あかつき」は、打ち上げ時、太陽電池パドルを横ではなく上に畳んでいますが、この方が固定しておく機構が少なくて軽量化できるため、我々の方から提案しました。--「はやぶさ2」と「あかつき」に加え、2015年4月からはジオスペース探査衛星「ERG」のプロジェクトマネージャも兼務。忙しいですね。「ERG」は開発の真っ最中なので、今のマネジメントの仕事としては、これが中心ですね。ただ、現在は「はやぶさ2」と「あかつき」も大きなイベントを控えているので、実運用の計画立案はシステム担当者に任せつつ、運用計画全体の確認を行っています。「ERG」は2機目の小型科学衛星で、1機目の惑星分光観測衛星「ひさき」とは、共通のバス機器を採用しています。ただ、「ひさき」が三軸姿勢制御であったのに対し、「ERG」はスピン安定制御であるなど、違いもあります。コンポーネントは同じでも、様々なカスタマイズが入っています。個人的に「ERG」はのぞみに似ているところがあると思っていて、たとえば観測センサーですね。もちろん観測対象が地球と火星という違いはあるんですが、搭載されているセンサーは似ていたりするんですよ。予定している2016年度の打ち上げに向け、「のぞみ」を今度こそ周回させるつもりで、しっかり仕上げたいと思います。
2015年11月30日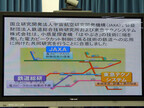
宇宙航空研究開発機構(JAXA)および鉄道総合技術研究所(鉄道総研)、東急テクノシステムの3者は11月11日、都内で会見を開き、小惑星探査機「はやぶさ」の技術に端を発した電力ピークカット制御技術の鉄道への応用に向けた共同研究を開始すると発表した。すでにJAXAでは、「はやぶさ」で培った電力制御技術をエネルギーマネジメントシステム(EMS)に活用する取り組みを進めてきているが、今回の共同研究もそうした取り組みの1つ。今回の研究では、宇宙機として初めて「はやぶさ」が取り入れた電力のピークカット技術を応用して、鉄道網全体で消費する電力量を抑えつつ、ダイヤの遅延をできる限り起こさない技術の実現を目指す。一般的に電気車(列車)は、速度が上がったり、加速度が上がるほど大きなエネルギーを消費する。朝の通勤時間帯、ダイヤが乱れ、遅れを取り戻すために加速をする、といったことが良くあるが、この時間帯が電力のピークであり、鉄道会社は電力事業者との契約を、このピーク時の電力で契約している。ただし、それ以外の時間帯は、そこまで電力を必要とするものでもなく、ほとんどの時間、変電設備の能力は余剰状態となっているという。今回の研究の肝は、各列車ごとに、ダイヤに対する遅れの度合いなどを判断し、ダイヤに近づくための走行を行うためには、どの程度の電力が必要かを提示。定められた上限値の中で、各列車が優先度を判断し、電力を融通することで、ピークカットを行おうという部分。従来のピークカットの考え方は、中央のサーバと、各末端のクライアントに分かれ、サーバが各クライアントと双方向でデータをやり取りし、膨大な演算を行い、それぞれに最適と思われる電力を割り振ろう、といったサーバを中心とした「専制君主型」とも言える方式であったが、「この場合、一定の範囲内での計算を行うとしても、新たに途中でその範囲に誰かが入ってきたり、誰かが出ていったりしたら、それを元に再計算を行う必要があり、莫大な計算資源が必要となる」(JAXA 宇宙科学研究所宇宙飛翔工学研究系教授、シニアフェローの川口淳一郎氏)とする。一方、サーバを用いず、参加者全員の「合議型」とも言える新方式の場合、「それぞれの列車が、自らがダイヤに対して、どの程度の優先度の存在かを考え、遅れの大きい電車に電力を割り当てる制御方式であり、言い換えれば、許される電力資源のもとで、常に最も遅れの大きい列車の遅れを最小化する方法を提供することが可能となる(mini-max)」とし、アルゴリズム次第では、ダイヤが乱れても、電力をそれほど消費しないで、もとのダイヤに戻すことが可能になるとする。すでに3者は11月2日付で共同研究に関する調印を終えており、今後、本格的に研究を進めていくこととなる。研究の役割分担としては、JAXAが「電力ピーク技術の提案」、鉄道総研が「鉄道総研はシミュレータによる電力ピークカット効果の予測」、東急テクノが「東急テクノシステムは車両の改造や設備工事の知見」としており、具体的には東急テクノから、鉄道の運行データに関する各種パラメータなどを鉄道総研に提供、鉄道総研にて、開発されたアルゴリズムを元にシミュレーションを実施し、どの程度の効果があるのか、といったことの検証を行う。「ではJAXAは何をするのか、という話が出てきそうだが、我々としては、運行に遅れがある際のシステムの安定性の検討などを行っていく」(川口氏)とのことで、3者で実用化に向けて3年を1つのめどとして行っていくとする。また、将来的には東急電鉄の車両を使って、実証実験も行いたいとしており、シミュレーションで良い結果が得られれば、実際にそれを実現するためのソフトウェアやハードウェアの開発も行っていきたいとしている。
2015年11月12日
宇宙航空研究開発機構(JAXA)は11月2日、小惑星探査機「はやぶさ2」を正確に地球スイングバイさせるための軌道修正であるTCM(Trajectory Correction Maneuver)の実施予定を発表した。発表によれば、TCM-1を11月3日、TCM-2を11月26日、TCM-3を12月1日に実施し、TCM-1およびTCM-2実施後に次のTCMが必要かどうかを判断する。なお、実施時刻やスラスタの噴射時間については、「はやぶさ2プロジェクト」のウェブサイト上で公表するとしている。「はやぶさ2」の地球スイングバイは12月3日に実施される予定。地球スイングバイ後、2018年6-7月に目標とする小惑星「リュウグウ」に到着、科学観測やサンプル採取を行った後、2020年11-12月に地球へ帰還する計画となっている。
2015年11月02日
小惑星探査機「はやぶさ2」が目指す小惑星の名前が「Ryugu(リュウグウ)」に決定した。「リュウグウ」はこれまで、「1999 JU3」という仮符号で暫定的に呼ばれていた。「リュウグウ」は1995年5月10に米LINEARチームが発見。大きさはおよそ900mで、地球と火星に挟まれるかたちで太陽の周りを公転している。通常、小惑星の名称は発見者が国際天文学連合(IAU)に提案し、その後IAUでの審査を経て、IAUの下部組織である小惑星センターが発行する科学誌「マイナープラネットサーキュラー」に名称が掲載されることで正式な発表となる。今回はの場合はJAXAがLINEARチームに「はやぶさ2」プロジェクトから提案させて欲しいと申し入れ、了承された。○商標権トラブルなども考慮した選出「リュウグウ」という名称を選んだ理由について、名称案選考委員会の委員長を務めた多摩六都科学館の高柳雄一 館長は「(『リュウグウといえば』)日本では世代を超えて『浦島太郎』の物語が思い出される。浦島太郎は竜宮城から玉手箱を持ち帰ったが『はやぶさ2』もサンプルをカプセルに入れて持ち帰る。」と語るなど、サンプルリターンを目標としている「はやぶさ2」の姿が昔話の主人公と通じることを挙げた。また、「リュウグウ」が水を含むと考えられていることや、既存の小惑星と類似しておらず商標権のトラブルなどの心配がないこともポイントだったという。また、「リュウグウ」は地球接近小惑星(NEO)に分類されることから、神話から名前をとることが慣例となっており、今回もそれに従っている。この点について「はやぶさ2」プロジェクトチームの吉川真 ミッションマネージャーは「(『はやぶさ』の目的地だった)「イトカワ」のときは伝説的な人物だったが、今回は神話じゃなければ通らないのではという心配があった。一般名詞だと厳しいと思っていたので本当に良かった」とコメントした。(注:「イトカワ」は日本のロケットの生みの親である糸川英夫 博士にちなむ)○異例のスピード決定さらに、JAXAからLINEARチームに名称案を送ったのは9月中旬だったとのことで、通常3カ月以上かかるとされる審査をわずか数週間で終えたことは極めて異例だ。吉川ミッションマネージャーは「正確な理由はわからないが、通常は名前が適当かどうかという議論で決定が延びる。今回はそれがなかったのではないか。また、『はやぶさ2』のミッションターゲットのことは(IAU側の)審査委員も知っているので、早めに考えてくれたのだと思う。」と語り、「リュウグウ」という名前が適切であったことと、12月3日に地球スイングバイというイベントを控えている「はやぶさ2」のミッションスケジュールを考慮してのスピード決着だったのではと推測した。なお、何らかの理由で「マイナープラネットサーキュラー」が本来のタイミングで発行されていないため、正式な名称決定日は確定していないものの、IAUの他のwebサイトで「1999 JU3」が「リュウグウ」であるということは明記されており、名称決定は間違いないという。「浦島太郎」の物語といえば、玉手箱を開けた主人公が中から出てきた煙を浴びて老人になってしまうという決してハッピーエンドとは言えない結末を迎える。一方、「はやぶさ2」ではカプセル内のサンプルから出たガスを蓋を開ける前に採取し、分析にかけることになる。「はやぶさ2」プロジェクトの津田雄一 プロジェクトマネージャーは「『浦島太郎』にはさまざまな解釈があると思う。『はやぶさ2』の場合はサンプルを開けることで惑星科学、生命の歴史を紐解くという意味で、その時計を前にすすめることになる」と「はやぶさ2」がもたらすであろう科学的成果に期待を寄せた。ちなみに、「リュウグウ」のほかには「アマテラス」「ヤマト」などの名前が人気だったとのことで、前者はすでに天体の名前として使用されていること、後者は戦時中の戦艦を想起させることから選出が見送られた。
2015年10月06日
宇宙航空研究開発機構(JAXA)は10月5日、2014年12月3日に打ち上げられ、2020年に地球帰還を目指す小惑星探査機「はやぶさ2」の目標到着地である小惑星「1999 JU3」の名称を「Ryugu」に決定したと発表した。同小惑星の名称は2015年7月22日から8月31日までの期間、広く一般から案を募集。その案を多摩六都科学館の高柳雄一館長を委員長とした有識者による選考委員会の選考を経て、決定された。名称案の応募総数は7336件で、その内「Ryugu」は30件ほどの応募があったという(類似として「Ryugujo」5件、「Ryuuguu」5件、「Ryugujyo」1件、「Ryugujou」1件、「Ryugu-zyo」1件)。選考委員会では、以下の4点を選考理由として挙げており、それらを元に実際に名称提案権を持つ米国LINEARチームに提案。同チームより、国際天文学連合に提案され、太陽系内小惑星の名称を管理する「Minor Planet Centor」の小惑星リストに「Ryugu」の名称が掲載されるに至ったという。「浦島太郎」の物語で、浦島太郎が玉手箱を持ち帰るということが、「はやぶさ2」が小惑星のサンプルが入ったカプセルを持ち帰ることと重なること小惑星「1999 JU3」は水を含む岩石があると期待されており、水を想起させる名称案であることすでに小惑星の名称として存在していない、神話由来の名称案の中で多くの提案があった名称であること「Ryugu」は「神話由来の名称が望ましい」とする国際天文学連合の定めたルールに合致し、また、第三者商標権などの観点でも大きな懸念はないためなお、はやぶさ2は2015年12月3日に、地球の引力を利用して軌道の変更とスピードアップを行う「地球スイングバイ」を実施する予定で、それにより、本格的に「Ryugu」への旅路に就くこととなる。
2015年10月05日
宇宙航空研究開発機構(JAXA)は7月21日、小惑星探査機「はやぶさ2」が目指している小惑星「1999 JU3」の名称案の募集について記者説明会を開催した。「1999 JU3」は1995年5月10日に米LINEARチームが発見した。大きさはおよそ900mで、地球と火星に挟まれるかたちで太陽の周りを公転している。この「1999 JU3」という呼称は正式名称ではなく、仮符号という暫定的なもので、「1999」が発見された年を、「J」が発見された月(頭文字ではなく、5月1日-15日に発見された事を表している)、「U3」は発見された順番を表している。小惑星の名称決定までにはいくつかのステップを踏む必要がある。今回の場合、まずJAXAが集まった名称案の中から最もふさわしいものを選出する。その後、選出した名称を説明文とともに発見者のLINEARチームに提出し、LINEARから国際天文学連合(IAU)に提案してもらうことになる。IAUでの審査を経て、IAUの下部組織である小惑星センターが発行する科学誌「マイナープラネットサーキュラー」に名称が掲載されることで正式な発表となる。スムーズに進めば今年末には名称が正式に決定する見込みだ。小惑星の名称を提案する権利は発見者が持つが、今回の場合はJAXAがLINEARチームに「はやぶさ2」プロジェクトから提案させて欲しいと申し入れをし、了承された。また、小惑星の名称を考えるにあたり、いくつかの注意点がある。「1999 JU3」が分類される地球接近小惑星(NEO)は、神話から名前をとるのが慣例となっている。神話が日本または海外のものであるかどうかは問われないが、NEOの場合、天地創造や死後の世界に関するものは避けることとされている。ただ、「はやぶさ」がサンプルリターンを行った「イトカワ(日本のロケットの生みの親である糸川英夫 博士にちなむ)」のように、特別な理由があれば神話以外から名付けられる可能性もあるという。このほかでは、以下のような規則がある。アルファベットで16文字以下でなければならない1語であることが望ましいラテン文字(英語のアルファベット)で表記できるものでなければならないOffensive(不快な、感情を害するような、攻撃的な)なものであってはならない既存の小惑星や天然の衛星と同じまたは似た名前であってはならない戦争や政治に関連した出来事や人物についての名称は、その出来事が起こってから、あるいはその人物が死亡してから100年を経過する必要があるペットの名称は認められない宣伝となる名称は認められないこうした規則の詳細については、7月22日13時30分より開設予定の名称案募集用の特設WEBページ内でも説明される予定。また、JAXAは、名称案が既存の小惑星や衛星と重複していないかIAUのホームページで確認することを勧めている。募集期間は2015年7月22日13時30分~8月31日10時(日本時間)。JAXAのWEBページ、ハガキのほか、7月24日・25日のJAXA相模原キャンパス特別公開での応募用紙から応募を受け付ける。
2015年07月21日
宇宙航空研究開発機構(JAXA)は6月7日、小惑星探査機「はやぶさ2」の第2回イオンエンジン連続運転を同日午前0時25分に正常に終了したと発表した。6月2日から開始した連続運転は102時間と計画通りの稼働時間となり、12月3日に予定されている地球スイングバイに向けたイオンエンジン連続運転は第1回目の409時間と合わせて511時間となった。JAXAは、第2回目の連続運転の結果を踏まえ、今後、地球スイングバイまでに軌道微修正のためのイオンエンジン稼働が実施される場合もあるとしている。
2015年06月08日
国立天文台のすばる望遠鏡は6月4日、小惑星探査機「はやぶさ2」の行き先として知られる小惑星「1993 JU3」の姿を捕らえた画像を公開した。公開された画像は5月20日に撮影されたもので、観測当時「1993 JU3」は地球から2億4000万kmの距離にあった。明るさは22.3等程度だったが、集光力に優れるすばる望遠鏡では30秒の露出時間で撮影に成功した。観測を行ったハワイ観測所の寺居剛氏は「観測時は明け方のうえ雲が多く、条件はあまり良くなかったのですが、『1999 JU3』が放つ微かな光をはっきり捉えることができました。」とコメントしている。
2015年06月05日
宇宙航空研究開発機構(JAXA)は4月27日、2015年3月3日~21日にかけて実施した小惑星探査機「はやぶさ2」の第1回イオンエンジン連続運転を実施、安定して深宇宙を航行中であること、ならびに6月に第2回イオンエンジン連続運転の実施、12月3日に地球スイングバイの実施をそれぞれ計画していることを明らかにした。はやぶさ2のイオンエンジン連続運転は、地球スイングバイに向けた軌道制御運転として行われるもので、2回に分けて合計約600時間が実施される計画。使用するイオンエンジンはAとDで、第1回目となる今回は409時間分の連続運転が行われたという。その結果、地球最接近距離が打ち上げ直後の軌道決定地314万kmから67万kmへ近づけることに成功したとするほか、6月上旬に地球スイングバイ時の最接近距離を1万km以下にすることを目指した第2回連続運転が実施される予定とする。なおJAXAでは、4月22日および24日にはESA(欧州宇宙機関)のMalargue局、DLR(ドイツ航空宇宙センター)のWeilheim局の2地上局の使用を想定した運用(通常は日本の臼田、クリティカル運用では米国航空宇宙局(NASA)のDeep Space Network(DSN)からも運用を計画)を実施したほか、今後8~9月にイオンエンジンによる軌道微調整期間、10月初旬以降に化学推進系による精密誘導の開始をそれぞれ予定しているという。
2015年04月27日
宇宙航空研究開発機構(JAXA)は3月21日、小惑星探査機「はやぶさ2」の第1回目のイオンエンジン連続運転が同日午前5時30分(日本標準時)をもって、正常に終了したと発表した。これは、同日の運用において取得したテレメトリデータにて確認されたもの。今回のイオンエンジン連続運転は3月3日より409時間実施され、これは計画通りの稼働時間だという。またJAXAでは、第2回目のイオンエンジンの連続運転は2015年6月上旬ころに実施予定としているほか、今後、イオンエンジンの稼働状態や連続運転後の軌道情報などについての詳細解析を進めていく予定としている。
2015年03月23日
宇宙航空研究開発機構(JAXA)は3月3日、小惑星探査機「はやぶさ2」を小惑星1999 JU3に向けた航行段階(巡航フェーズ)に移行すると発表した。「はやぶさ2」は2014年12月の打ち上げ以降、約3カ月間にわたり搭載機器の初期機能確認を行ってきた。今後は、2015年11-12月に予定されている地球スイングバイに向けた運用を実施していく。地球スイングバイまでの間でイオンエンジン2台による運転を期間中2回に分けて合計約600時間行い、航行速度を60m/秒増速する計画だ。スイングバイ以降のミッションスケジュールとしては、2018年6-7月に小惑星1999 JU3に到着、科学観測および試料採取を行った後、2020年11-12月に地球に帰還する予定となっている。
2015年03月03日
●打ち上げ後、順調に航海を続ける「はやぶさ2」宇宙航空研究開発機構(JAXA)は1月28日、小惑星探査機「はやぶさ2」に関する記者会見を開催、これまでの運用状況について説明した。現在、探査機の状態は正常。4台のイオンエンジンの稼働を確認したほか、日本の探査機としては初となるKaバンド通信にも成功した。今後1カ月で残りの初期チェックを行い、定常運用に移行する計画だ。はやぶさ2は昨年12月3日に打ち上げられており、それからほぼ2カ月が経過した。2日間のクリティカル運用が完了した後、現在は搭載機器や地上システムの機能を確認する初期運用が実施されているところで、これまでに基本的なところはほぼ完了。國中均・はやぶさ2プロジェクトマネージャが「万全」というくらい、順調に進んでいるようだ。○イオンエンジンは4台とも正常まずイオンエンジンについてだが、12月23日から4日をかけて、スラスタA~D単独の試運転を実施。正常な推力が出ていることが確認できた。そして1月12日からは2台同時運転、16日にはA+C+Dの3台同時運転にも成功。このときの推力は約28mNで、ほぼ定格通りだった(イオンエンジン1台の推力は、初号機の8mNから10mNに向上している)。イオンエンジンは非常に燃費が良い反面、推力がとても小さいという特性がある。このため、小惑星に向かう巡航運転時には長時間の連続稼働が必要になるのだが、1月19日~20日に初めてスラスタA+Dによる24時間連続自律運転を行い、無事成功。3月からの巡航運転に目処が立った。はやぶさシリーズはイオンエンジンを4台搭載するが、同時に運転できるのは最大3台。1台は予備という位置付けだ。だが初号機では、初期運用中にスラスタAに問題が出て、いきなり予備が無い「危機的な状況」(國中プロマネ)になってしまった。かろうじて帰還できたものの、これは解決すべき大きな課題だった。はやぶさ2のイオンエンジンは、國中プロマネが「かなり粒が揃ったものを作ることができた」と胸を張る自信作だ。部品レベルでの国産度を高めたほか、キセノンガス(推進剤)の供給装置も改良。初号機よりも、きめ細かい流量制御ができるよう取り組み、安定した推力を実現したという。4台とも正常だったことで、「1台の予備」を維持することができた。國中プロマネは「厳しい航海が待っている」とし、今後について決して楽観視はしないものの、順調な初期運用の結果には、「機材としては十分な余裕を持って、小惑星への往復航海に乗り出せた」と素直に喜んだ。ところで12月19日~22日にイオンエンジンのベーキングを実施しているが、これは初号機では無かった手順だ。ベーキングというのは、温度をわざと上げることで、揮発性のガスを出し切る作業。特に打ち上げ直後、真空になったばかりというのは、機体からそうしたアウトガスが出やすい。ベーキングによって、機体を乾かすというわけだ。國中プロマネによれば、イオンエンジンは真空度が完全でないと、良いオペレーションができないという。初号機では、そうした知見が十分でなかったために、スラスタAの機能を落としてしまった。そのため、はやぶさ2では、ヒーターで50℃に温めたり、姿勢を変えて太陽光を当てたり、プラズマを点火するなどして、運転前にベーキングを行った。○スラスタBを使わないのはなぜ?2台同時運転、3台同時運転の組み合わせを見ると、スラスタBだけが外されていることが分かるが、これはスラスタBに問題があるわけではなく、バックアップとして取っておくためだという。当面はA/C/Dの3台のみを使って、軌道変換を行っていく計画だ。細かい話になるが、なぜスラスタBなのか、気になる人もいるだろう。「B」はバックアップのB - という理由ではもちろん無い。先ほど、同時に運転できるのは最大3台だと説明したが、じつはスラスタは4台あるのに、直流電源は3台しかない。はやぶさシリーズでは、リレーを電源とスラスタの間に入れることで、組み合わせを変えているのだ。ただ、4台のスラスタがすべて同じ条件ではない。スラスタAとDは繋ぐことができる電源が1つに決まっているが、スラスタBとCは2つの電源から選ぶことができる。こちらの方が自由度が高いので温存しておいて、なるべく先にスラスタAとDを使い倒したいというわけだ。一方、各スラスタの配置上、太陽側にあるスラスタAとBは温度が上がりやすい。しかし温度はなるべく上げたくないという事情があって、日陰側のスラスタCとDを使いたい。条件としては、ほんの僅かな違いであるものの、以上2つの明確な理由があって、A/C/Dの3台に決まったそうだ。ちなみに、リレーがあるのなら、一定時間ごとに切り替えて、4台を均等に使っていくことも考えられるが、そうしないのは、リレーが機械式だからだ。宇宙では、無駄な機械操作はしないのがセオリー。「必要がない限り、リレーの切り替えはさせたくない」(同)という判断により、使用する3台を固定化したわけだ。なお初号機では、復路で健全なスラスタが無くなり、帰還に黄信号が灯ったとき、異なるスラスタのイオン源と中和器を組み合わせるという、裏技に近い「クロス運転」で最大の危機を脱した。はやぶさ2にも「当然ながら初号機の機能はすべて入っている」わけだが、國中プロマネの「でも今回はそういう機能は使わないで帰れるようにしたい」というのは本音だろう。●「はやぶさ2」の最大の懸念点とは…○リアクションホイールのキモはZ軸探査機の姿勢制御に使うリアクションホイールも、初号機で大きなトラブルを起こした場所だ。初号機のリアクションホイールは、小惑星に向かう途中でX軸、小惑星到着直後にY軸が故障しており、それ以降、残るZ軸だけによる綱渡りの運用を強いられていた。リアクションホイールは、円盤の回転速度を上下することで、機体の回転を調整することができる装置。1台で1軸周りの回転しか制御できないため、3軸制御のためには最低3台が必要になるのだが、初号機は厳しい重量制限があったせいで、3台ちょうどしか搭載することができなかった。通常は、冗長のために4台を搭載する。初号機での故障は、初号機用に特別に変更した部分が原因だったと考えられており、標準品を使用したはやぶさ2で同じ現象が起きる可能性はないのだが、今回はセオリー通り4台を搭載。だが、セオリー通りでないのは配置の方法だ。4台が正四面体の位置関係になるスキュー配置ではなく、Z軸のみ2重(XYZZ)にした珍しい配置になっているのだ。このように非常に特殊な配置を採用したのは、初号機での知見があるからだ。もしリアクションホイールが壊れたとしても、探査機には姿勢制御スラスタ(RCS)もあるので、燃料がある限り、3軸制御は可能。だが、初号機はRCSも使用不能になったのに、Z軸のリアクションホイールだけで、地球に帰還することができた。この1台だけでは、Z軸周りの回転しか制御できない。では残りのX軸とY軸はどうしたのかというと、初号機では、太陽光圧により発生する微弱な回転力や、キセノンガスの直接噴射などを組み合わせて、姿勢制御する新しい方法を編み出した。Z軸さえ無事なら、初号機の方法で、姿勢制御は何とかなる。だからZ軸は特に手厚く、というわけだ。ちなみに初号機では、太陽光圧は非常時の姿勢制御として利用されたわけだが、はやぶさ2では、リアクションホイールを温存するために、むしろ積極的に活用する方針。國中プロマネによれば、「イオンエンジンなどの難しい運転がない場合は、XYZの3台のリアクションホイールを停止して、Z軸の1台だけで姿勢制御する」ことを狙うそうだ。○日本初の深宇宙Kaバンド通信を確立そのほか、ここまでの初期運用で大きなトピックスとしては、はやぶさ2で新たに搭載されたKaバンドアンテナによる通信の確立がある。深宇宙でのKaバンド通信に成功したのは、日本の探査機では初めて。Kaバンドは従来のXバンドに比べて4倍高速であり、より大量の観測データを小惑星から送ることができるようになる。しかし残念なことに、日本国内には、はやぶさ2とKaバンド通信ができる地上局がない。そのため今回は、NASAの深宇宙ネットワーク(DSN)各局の協力を得て通信を行った。日本国内にもKaバンド通信が可能な地上局はあるが、これらは地球を周回する衛星向けで、深宇宙通信の能力はない。探査機との通信には、もっと大きなアンテナが必要で、そのための施設として臼田と内之浦に直径64mと34mの大型アンテナがあるものの、対応しているのはXバンドで、Kaバンドは利用できない。日本の小惑星探査は世界最先端の成果を上げているが、こと深宇宙との通信設備に関して言えば、米国から遥かに遅れていると言わざるを得ない。臼田局は、ハレー彗星探査機「さきがけ」「すいせい」の時代に作られたアンテナで、すでに30年が経過している。今後も使い続けるのは「寿命の問題もあり難しい」(同)という状態だ。そこで、JAXAでは「我々は"臼田後継"と呼んでいるが、臼田局を作り替えることを計画している」(同)とのこと。具体的なスケジュールはまだ検討中だが、國中プロマネによれば、「XバンドとKaバンドの送受信が可能な設備を整えたい」そうだ。なお米国はDSN局として、世界3カ所にゴールドストーン局、キャンベラ局、マドリード局を整備。これにより、24時間の運用を可能としている。臼田後継が実現したとしても、日本から探査機が見えている時間だけの運用になり、小惑星近傍ではいずれにしてもNASAの協力を得なければならないが、それでも早急の整備を望みたいところだ。○ハードは大丈夫、では最大の懸念は…このようなプロジェクトでは、どうしても探査機本体に注目が集まりがちであるが、小惑星探査は探査機だけで行えるわけではない。國中プロマネは、「地上の設備、ネットワーク、人の技量」が必要だと指摘。いま一番心配しているのは、「ハードウェアではなく、いかに人間組織を作り上げるか」ということだという。はやぶさ2は小惑星1999 JU3に約1年半滞在し、この間に、小惑星の観測、表面物質の採取、インパクタの運用、ランダー/ローバーの投下などを実施する。探査機の運用で、もっとも忙しい時期だ。「24時間連続のオペレーション。8時間3交代くらいで1年半を乗り切る」(同)ということで、実力のあるスタッフが大勢必要になる。また、たくさんのデータを取得したら、その分析も必要となる。小惑星のどこに何がありそうか、科学的なデータを積み上げないと、着陸地点を決めることができない。大勢の科学者が必要で、大学や研究機関の協力が不可欠だ。小惑星に到着するまであと3年半。それまでに人を育て、協力体制を構築しなければならない。今後は、どれだけ強力な「チームはやぶさ2」を準備できるかがポイントだと國中プロマネは見ており、「万全の体制で他国に負けない小惑星探査がしたい」と改めて意気込みを述べた。
2015年02月04日
10種の美容液成分が、うぶ毛感あふれるナチュふさ眉に!株式会社伊勢半は、10種類の美容液成分配合で眉毛と地肌の両方をケアできる眉毛美容液を2015年2月9日(月)に発売する。シルクプロテインをはじめとした10種類の美容液成分を配合して、眉毛と地肌の両方にアプローチする。地肌からケアして、ハリコシのあるナチュふさ眉に導くアイテムだ。・10種類の美容液成分配合シルクプロテイン・パンテノール・アルギニン・オタネニンジン根エキス・シャクヤク根エキス・ビワ葉エキス・ローヤルゼリーエキス・水溶性コラーゲン・ヒアルロン酸Na・セラミド(プレスリリースより引用)株式会社ネオマーケティングによるモニターテストでは、91.7%の女性が眉の変化を実感し、具体的には「眉毛が生えてきた気がした」、「使う前より眉毛が濃くなった気がする」などの感想があがっている。5つのフリー処方で眉毛と地肌の両方にアプローチやわらかいチップを採用し、斜めにカットしたチップが眉尻等ピンポイントで塗りたいところや、うぶ毛や地肌にも塗りやすい。【商品特長】ヘビーローテーション アイブロウ リッチセラム5.5g1,080円(税抜1,000円 )(プレスリリースより引用)夜寝る前はもちろん、朝のメイク前にも、塗るとすぐに、さらさらになる速乾タイプが便利なうえに、シリコンフリー、鉱物油フリー、合成着色料フリー、合成香料フリー、オイルフリーで地肌と眉毛にやさしいのもうれしい。(画像はプレスリリースより)【参考】・株式会社伊勢半プレスリリース/PR TIMES
2015年01月28日
ダイキンは1月26日、宇宙航空研究開発機構(JAXA)が公開している小惑星探査機「はやぶさ」発の技術を応用した電力ピークカット制御技術を、ルームエアコンへ適用する技術検証を開始すると発表した。同技術は、「はやぶさ」が宇宙空間で限られた電力を有効利用するために開発された技術を基に、それぞれの機器が独立して並列にピーク電力を下げる制御法を、家電機器の消費電力ピークカット制御に応用するものである。家庭内の照明、冷蔵庫やエアコンなどの機器に優先順位をつけ、同時に消費電力を制御することができる。具体的には、すでにリモコンなどで使われている赤外線通信の技術を利用し、電力消費を抑えるための制御信号を一斉送信するシンプルなシステムで、高速なデマンドレスポンスの実現が可能である。また、大掛かりな追加投資をせずに短期間で効果を出すことができるため、通信インフラに課題がある新興国においても、使用電力量の低減や電力の安定供給が期待できるという。現在、JAXAでは航空宇宙分野における研究開発成果の民間転用を進めている。その一環として、同技術に関連する技術的仕様を公開し、多くの企業や団体に採用を促している。ダイキンは、この技術公開の取り組みに協力し、製品に適用するための検証を進めていくとしている。
2015年01月27日
ダイキン工業は1月26日、宇宙航空研究開発機構(JAXA)による「小惑星探査機『はやぶさ』発の技術を応用した電力ピークカット制御の技術」をルームエアコンへ適用する技術検証を開始した。電力需要が集中する時間帯の消費電力量を低く抑える効果が期待できる。JAXAは民生用家電機器への応用を促進することを目的として、「小惑星探査機『はやぶさ』発の技術を応用した電力ピークカット制御の技術」を1月13日に公開した。宇宙空間において「はやぶさ」が限られた電力を有効活用するための技術だ。家電機器に応用すれば、照明や冷蔵庫、エアコンなどの家電機器に優先順位を付けて、消費電力を制御できるようになる。このたびダイキン工業は、ルームエアコンのピークカットを目指して、同技術を適用する技術検証を開始した。すでにリモコンなどで採用されている赤外線通信の技術を利用したシンプルなシステムで、大掛かりな追加投資をせずに短期間で効果を出すことが可能だという。通信インフラに課題がある新興国などにおいても、使用電力量の低減や安定した電力供給が期待できる。また、1月28日から30日に東京ビッグサイトで開催される「新電力EXPO」において、同技術を搭載したルームエアコンのテストモデルを展示する。
2015年01月26日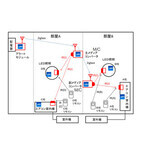
宇宙航空研究開発機構(JAXA)はこのほど、小惑星探査機「はやぶさ」に端を発した電力制御技術を家電へ応用するための通信情報をオープンプラットフォームで公開した。「はやぶさ」では、イオンエンジンに一定の電力を供給する必要あり、搭載された計200個のヒーターのスイッチを、温度状況に合わせて切り替える必要があったため、電力のピークカット技術が採用された。このときの技術は、HEMS(Home Energy Management System)やBEMS(Building Energy Management System)などと同様に、コンピューターが各機器の電力使用量を監視し、一度サーバーに情報を集積して、各機器に電力を割り振る方式だった。この方式では、1個体とサーバーが双方向通信するため、個体の数が増えると、制御に時間がかかってしまう。今回の技術では、各機器に優先順位を設定することにより、制御装置から各機器へ、使用できる電力の総量のみを通信し、それぞれの機器が優先順位に応じて使用する電力を自分の判断で変更する。双方向で通信する必要が無いため、従来の制御方式とは違い、個体数が増えても制御速度が落ちることはない。各機器が独立分散の並列処理をするため、制御系統に機器を新たに追加、もしくは途中で離脱させる場合にも対応できる。制御システムの構築には配電盤・家電に小さな機器を取り付けた上で、家電機器側に設けられる並列処理のための論理を導入するだけで済む。既存設備を活用できるため、導入コストを抑えることができる。今回公開されたオープンプラットフォームは、同報発信する情報の記述方法にあたるもので、同方式を利用したいという家電機器メーカーに対しては、JAXAから並列処理のための論理を無償で提供する。JAXA宇宙科学研究所の川口淳一郎 教授によれば、同技術は電車の電力制御や、携帯電話での情報処理などへも応用可能で、電力事業に関する新たなビジネスモデル創出の鍵となり得るとのこと。なお、同技術は1月28日~30日に東京ビッグサイトで開催される「新電力EXPO2015」でデモンストレーションが実施される予定となっている。
2015年01月21日
既報の通り、宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は12月3日、小惑星探査機「はやぶさ2」をH-IIAロケット26号機で打ち上げた。本レポートでは、打ち上げ後に開催された記者会見の内容をまとめてみたい。○連続成功は「自分たち自身との戦い」2001年より運用を開始したH-IIAロケットの打ち上げは、今号機で26回目。失敗は6号機の1回のみであり、今回の打ち上げで成功は20機連続、成功率は96.2%となった。兄弟機H-IIBも合わせると、24機連続で成功率は96.7%ということになる。唯一の失敗だった6号機の打ち上げは2003年9月だった。以来11年間、H-IIAは一度も失敗することなく運用を続けているが、MHIの阿部直彦宇宙事業部長は「1つ1つの部品を確実に作って、1つ1つの作業を確実に行ってきた結果」だと評価。今後、連続成功のさらなる継続には「慣れ、マンネリ、油断、奢りを自ら戒めることが重要」とし、「自分たち自身との戦いだと思っている」と気を引き締めた。成功を続けることで、商業打ち上げの受注に勢いを付けたい同社であるが、これまでのところ、受注実績は、韓国KARI、カナダTELESAT、スカパーJSATの3件にとどまる。商業打ち上げの受注では、信頼性、コスト、能力という3つの要素が重要だ。このうち、信頼性についてはすでに及第点であり、能力についても第2段の高度化で改善のめどが立っている。最後に残る大きな課題はコストの高さだった。しかし、これについては近年の円安が追い風になりつつある。阿部氏は「1ドル=80円台の時代はまったく歯が立たなかったが、今であれば、オンタイム打ち上げ率の高さやサービスなどとの組み合わせで、ある程度戦えるところまで来た感触を得ている」という。「来年のTELESATの打ち上げをしっかりやることで、我々の評価が上がる。世界標準でやれるということを世界に認めてもらう」と意気込みを述べた。また今回の打ち上げは、ウィンドウが10日間しかないという特殊なものだった。打ち上げ執行責任者を務めたMHI宇宙事業部の二村幸基技監・技師長は「基本的にはいつもと同じ気持ちだった」としつつも、「期限を切られているのに厳しい天候が続いていて、非常にプレッシャーを感じていた」と打ち明ける。「我々としては、最善を尽くし、打ち上げ可能な時期に確実に打ち上げるために準備をしてきた。今日というチャンスが訪れたので、それを必ずモノにするつもりで、作業者一同が打ち上げに臨んだ」と振り返る。天候不良により2回の延期はあったものの、世界が注目した「はやぶさ2」の打ち上げを無事完遂することができたとあって、安堵の表情を見せた。○今回も「厳しいオペレーション」を覚悟「まず報告したいのは、はやぶさ2の宇宙航海がようやく始まったということ。応援していただき、大変ありがとうございます」…会見の冒頭、JAXAの國中均・はやぶさ2プロジェクトマネージャが最初に口にしたのは感謝の言葉だった。「はやぶさ2」はなかなか予算が付かず、実施が危ぶまれた時期もあった。開発が正式に始まったのは2012年。小惑星1999 JU3に向け、探査機を2014年末に打ち上げるためには、本当にギリギリのタイミングであった。國中プロマネの発言は、実現の追い風となった国民からの高い支持の声に対するものだったのだろう。過去にはこんな話も…【レポート】「はやぶさ2」が危ない? 小惑星探査機の後継機、海外で打上げかしかし、なんとか実現に漕ぎ着けた「はやぶさ2」であるが、これでやっとスタートラインに立ったに過ぎない。探査機の場合、本当に大変なのはこれからだ。國中プロマネは会見では終始硬い表情で、ほとんど笑顔を見せることがなかったのだが、気持ちはすでに「これからの旅路」に向いているような印象を受けた。以下、國中プロマネの言葉を並べる。「これから6年間、深宇宙航海が続く。プロジェクト一同としては大変緊張している。宇宙航海は決して簡単ではない。初号機ができたからといって、同じ航海ができるとは考えていない。初号機の経験をもとに、良い探査機を作り込んだと自負しているが、はやぶさ2の総重量はたったの600kg。そんな"小舟"で宇宙の大海原に乗り出そうというわけだから、きっと厳しいオペレーションが待っているだろう」「はやぶさ2は、我々が望んで仕立てた新しい船。これを作り込むこともJAXAの仕事だが、その船を使いこなすこともJAXAの仕事である。新しい船で新しい目標に向かって、ようやく出帆したところ。必ずや6年後に地球に帰ってくることを目標に、いいオペレーションにしたいとチーム一同念じている」「もちろん成功することを目標として努力するが、成功は常に約束されているものではない。小惑星に辿り着いて、着実に観察し、それから着陸・離陸を行い、さらに地球に帰ってこなければならない。はやぶさ2は、これをシーケンシャルに行わなければならないという、大変難しいミッション。途中で1つでも装置を失えば航海は危うくなる」「そういうことがないように探査機を作り込んできたが、宇宙という大自然に小舟を放り込んだ以上、この後一体何が起こるかは分からない。気を引き締めて、慎重に、かつ挑戦的に、仕事をしなければ成功しない。この2つをうまく使い分け、往復探査を成功させるために、緊張感を持って作業に取りかかりたい」初号機での経験を反映させ、信頼性を高めたとは言え、小惑星探査の実績はまだその1回だけだ。「2回目だから前回よりは簡単に行くだろう」というのは楽観的に過ぎる。おそらく、今回も様々な困難が待ち構えているだろうと筆者も思う。だがそれでも、そうした苦難を乗り越えた上で、最後にはぜひとも成功をもたらして欲しい。なお、打ち上げ後の探査機の状態は健全であることが確認されている。2日間のクリティカル運用フェーズで太陽電池パドルの展開、サンプラーホーンの伸展、リアクションホイールによる3軸姿勢制御の確立などを実施し、その後2~3カ月の初期運用フェーズで搭載機器の初期チェックを行う予定。イオンエンジンの初点火も、この初期運用フェーズで実施される見込みだ。
2014年12月11日
宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は12月3日13時22分4秒、H-IIAロケット26号機で小惑星探査機「はやぶさ2」の打ち上げを実施した。ロケットは正常に飛行し、打ち上げの約1時間47分後に「はやぶさ2」を分離。所定の軌道に投入することに成功した。同ロケットの打ち上げ成功はこれで20機連続。2回の延期のあとで迎えた打ち上げ当日。朝から曇ったり晴れたりの気まぐれな天気だったが、打ち上げの瞬間は青空が見えるまずまずのコンディションに。定刻通りに打ち上げられたロケットは飛行中、雲に隠れることもあったものの、竹崎展望台からはSRB-Aの分離まで見ることができた。しかし、地上から見えなくなってもロケットは働き続けている。搭載衛星を分離して、所定の軌道に投入することがロケットの仕事。これが確認できて初めて、ロケットの打ち上げは「成功」と言えるのだ。打ち上げを見届けた後、我々報道陣は竹崎展望台3階のプレスセンターで衛星分離の瞬間を待つことになるのだが、居合わせた広報担当のJAXA/MHI職員は終始リラックスした雰囲気で、飛行が順調であることをうかがわせた。そして15時10分ころ、分離の一報が届くと、プレスセンターでも拍手がわき起こった。分離が無事完了して、バトンはロケットから探査機へと手渡された。ここからが「はやぶさ2」の6年にわたる長き旅路の始まりである。決して簡単なミッションではないだろうが、人類に新たな小惑星のサンプルをもたらすことを期待したい。なお同日17時20分より記者会見が開催されたのだが、その内容については別途レポートする。
2014年12月04日
NECは12月3日、宇宙航空研究開発機構種子島宇宙センターから、H-IIAロケット26号機にて打ち上げが成功した小惑星探査機「はやぶさ2」において、システム設計・組み立て・試験・インテグレーション支援を担当しており、今後4カ月にわたる初期運用の支援に取り組んでいくと発表した。はやぶさ2を構成する主な機器には、「電気推進系(イオンエンジン)」「化学推進系(RCS:Reaction Control System)」「通信系(アンテナ)」「ターゲットマーカ」「再突入カプセル」などがある。また、同社は化学推進系を除くバス機器全般の設計・製造のほか、イオンエンジンやサンプラー、中間赤外カメラといった搭載機器の設計・製造も担当している。「はやぶさ2」のミッション機器データ処理装置では、一部機器との通信に小型科学衛星「ひさき」(2013年打ち上げ)により世界で初めて軌道上実証された、先進の人工衛星用データ通信インタフェース規格「SpaceWire/RMAP」を採用し、ロバスト性(強靭性)を一段と向上させているという。はやぶさ2のミッションを達成するために必要な機器としては、中間赤外カメラのほか、「光学航法カメラ」「近赤外分光」「レーザ高度計」「サンプリング装置」などがある。
2014年12月04日
宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は12月3日、午後1時22分4秒に種子島宇宙センターより小惑星探査機「はやぶさ2」を打ち上げた。当日の種子島宇宙センター近隣の天気は高気圧に覆われ、打ち上げ時の天候は晴れ、風速は北西の風4.3m/sで、気温は約16℃と、雲はあるものの穏やかな天気となった。打ち上げの107秒後にH-IIAロケット26号機の2本の固体ロケットブースター(SBR-A)が切り離され、4分10秒後に衛星フェアリングの分離が実施された。なお、はやぶさ2は打ち上げ1時間47分後に分離が行われる予定となっており、その後、相乗り衛星の「しんえん2」、「ARTSAT2-DETHPACH」、「PROCYON」が順次切り離される予定となってる。
2014年12月03日
小惑星探査機「はやぶさ2」を打ち上げるH-IIAロケット26号機がついにその姿を現した。打ち上げが延期されている間、ロケットはVAB(大型ロケット組立棟)の中で出番を待っていたが、12月3日0時より、予定通り機体移動を開始。およそ25分で、500mほど離れた第1射点への移動を完了した。打ち上げは同日13時22分04秒に実施される予定だ。現在(10時半)の射場の天候は晴れ時々曇り。風はほとんど感じられず、非常に穏やかだ。すでに天候不良で2回の延期があった「はやぶさ2」の打ち上げであるが、今日は全く問題なさそうだ。さて、その26号機であるが、いつもとちょっと違うのは、第2段の塗装が白色になっていることだ。通常、この部分の色はオレンジ色。今回、塗装が白くなっているのは、「基幹ロケット高度化」プロジェクトで開発された技術が適用されたからである。このオレンジ色の正体は断熱材だ。H-IIAロケットの推進剤は第1段も第2段も液体水素と液体酸素の組み合わせであるが、これらの物質の沸点は極めて低く(水素はマイナス253℃、酸素はマイナス183℃)、蒸発を抑えるためには、極低温を維持する必要がある。断熱材は、そのためのものだ。しかし、液体水素は特に沸点が低くて蒸発しやすい。燃料タンクを断熱材で覆っていても蒸発してしまい、打ち上げの直前まで、蒸発した分を補充しているほどだ。第2段の場合、軌道上でも蒸発する分があるのだが、通常、搭載衛星を分離するまでの時間は30分間ほどと短いため、あまり大きな問題にならない。ところが26号機の場合、地球を1周してから2回目の燃焼を行うため、稼働時間が長い。そのため、白色塗装で太陽からの熱の入射を抑えて、蒸発量を下げる必要があるのだ。この白色塗装は21号機で実証実験が行われており、"本番"として適用したのは今回が初のケースとなる。白色塗装によって、水素の蒸発量を25%削減できるということだ。また、軌道上を飛行中にターボポンプを定期的に冷やす必要があるのだが、この冷却には液体酸素が使われる。冷却のために流した液体酸素は、第2段の推進には寄与しないので無駄になってしまうが、冷却の方式を変えたことで、この予冷で消費される液体酸素の量を60%削減できるそうだ。H-IIAロケットで静止衛星を打ち上げる場合、従来は、衛星側のエンジンを使って、頑張って軌道修正をする必要があった。しかし、商業打ち上げで競合する欧州のアリアン5ロケットは赤道上に射場があるため、衛星側の軌道修正の負担が小さい。これが、H-IIAで商業打ち上げを受注する際の大きな障壁となっていた。そこで考えられたのがH-IIAロケットの"高度化"だ。軌道面の修正は、遠地点側で行えば効率が良く、より衛星の負担を減らすことができるようになる。しかし、そのためには第2段の稼働時間を5時間程度にまで延ばす必要があり、推進剤の蒸発をなるべく抑えなければならない。この技術を今回適用したというわけだ。三菱重工業(MHI)は2013年、商業打ち上げで高度化を適用する初のケースとして、カナダTELESATより通信放送衛星「TELSTAR 12V」の打ち上げを受注した。今回の26号機の打ち上げは、その試金石にもなっているのだ。
2014年12月03日
宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は12月1日、11月30日、12月1日と打ち上げ日を延期してきた小惑星探査機「はやぶさ2」(Hayabusa2)/H-IIAロケット26号機(H-IIA・F26)の打ち上げ日程を、改めて12月3日とし、予定通りに実施する計画であると発表した。新たな打ち上げ時刻は12月3日の13時22分04秒(日本標準時)で、当日の射場周辺の天候は12月1日9時30分の種子島宇宙センター発表のものによると、くもりで西北西~北西の風が6~8m/s程度、気温は11℃~16℃程度とし、雨や打ち上げ時に制限がかかりそうな風速は生じないとの予測となっている。
2014年12月01日
小惑星探査機「はやぶさ2」の打ち上げが12月1日に決まった。平日になってしまったのはやや残念であるものの、延期が1日だけで済んで、引き続き現地に滞在している人も多いだろう。種子島ではどこでもロケットの打ち上げを見ることができるが、条件が良い場所となると、何カ所かに限られる。中でもオススメは「公式」の見学所である。この4カ所ではカウントダウンの音声も聞くことができて、みんなで盛り上がるには最適だ。ここで簡単に紹介するので、選択の際の参考にして欲しい。○長谷公園まず定番と言えるのは「長谷公園」だ。かなり広さがあり、駐車場のキャパシティも500台と最も多い。敷地が劇場のように前下がりになっているため、後方でも良く見えるのが嬉しいところだ。射点までの距離は6kmほどあるものの、心臓に響くような大音量が楽しめるのは現地ならではだ。ぜひ肉眼で見て、打ち上げのナマの迫力を体感して欲しい。1つだけ残念なのは、H-IIAを打ち上げる第1射点の場合、機体の一部が大型ロケット組立棟(VAB)の建物で隠されてしまうことだ。場所によって隠れ具合は違うので、長谷公園で見る場合には、なるべく左側にした方が良いだろう。なおH-IIBの第2射点の場合、隠れることはないので、どこから見ても大丈夫だ。○宇宙ヶ丘公園次に紹介したいのは「宇宙ヶ丘公園」。距離は長谷公園と同じくらいだが、キャンプ場も併設されており、野営しながら見る場合には特に便利だ。ロケットの下側が少し手前の山に隠されてしまうものの、第1射点も第2射点も遮るものがなく、打ち上げをよく見ることができる。駐車場は250台。○前之峯グランド「南種子町営陸上競技場(前之峯グランド)」は南種子町の市街地から近いのは便利であるが、射点がほとんど見えないので、せっかく種子島に来たのであれば、あえてここを狙う理由はない。特別な事情でもない限りは、他の3カ所の方が良いだろう。○恵美之江展望公園そして今年新しく整備されたばかりで注目なのが「恵美之江展望公園」だ。この場所の魅力は何と言っても距離の近さである。打ち上げ時は射点から3km以内が立ち入り禁止になり、プレスセンターがある竹崎展望台もその外側にあるわけだが、恵美之江展望公園は本当にギリギリ3km。北側から射点を見るため、今回のようにお昼頃の打ち上げだと逆光になってしまうものの、近いので撮影向きだ。長谷公園ほどではないものの、結構広さはあり、500人くらいは入れそうな印象。打ち上げ時には仮設トイレも用意されていて安心だ。ただし、この恵美之江展望公園は打ち上げ当日のみ解放されており、前日からクルマで乗り入れるようなことはできない。南種子町役場によれば、今回の開場時間は9時半を予定しているとのことなので注意して欲しい。他の見学所に比べて距離が半分という長所の反面、アクセスの悪さが難点。見学所までは未舗装の道路が1kmほど続いており、雨天時には路面状況が相当悪くなりそう。道幅も狭く、運転に慣れている人でなければ、避けた方が無難だろう。また駐車場は130台までと狭いので、入れない可能性もある。難易度はちょっと高めで、ハイリスク・ハイリターンな見学所と言えるかもしれない。なお、これら公式見学所については、以下のサイトにも情報があるので参考にすると良いだろう。今回、泣く泣く諦めた人も、機会があればぜひ来島して、現地で打ち上げを見ていただきたい。ファン!ファン!JAXA! 打ち上げ見学場所マップ南種子町役場 ロケット打ち上げ見学場宇宙航空研究開発機構(JAXA)
2014年11月30日
宇宙航空研究開発機構(JAXA)と三菱重工業(MHI)は11月29日、11月28日に打ち上げ延期を決定したH-IIAロケット26号機による小惑星探査機「はやぶさ2(Hayabusa2)の新たな打ち上げ日を12月1日に決定したと発表した。同決定は29日に開催された臨時天候判断会議の結果によるもの。打ち上げ日時の詳細は12月1日の13時22分43秒(日本標準時)となっている。また、これに伴いJAXAでは12月1日の12時25分から、種子島宇宙センターでの打ち上げの様子をライブ中継する予定だとしている。なおJAXAでは、今後の天候状況などによっては、再延期の可能性もあるとしている。
2014年11月29日