人体の筋肉からヒントを得て、無人惑星探査車のスリップ状態を検知するシステムを開発
芝浦工業大学(東京都江東区/学長 山田純)システム理工学部機械制御システム学科・飯塚浩二郎教授らの研究チームは、無人惑星探査車(無人ローバー)の土台であるシャーシの形状の変化からスリップ状態を検知する新しいシステムを開発しました。
この技術は、人間の筋肉が自身の走行状況を検知するために筋肉の張力変位を利用している点に着目して開発されました。無人ローバーを安全に走行させるために、これまでカメラによる視覚データに頼っていた走行状態の検出に、新たな方法の可能性を提供します。
※この研究成果は、「Remote Sensing」誌に掲載されています。
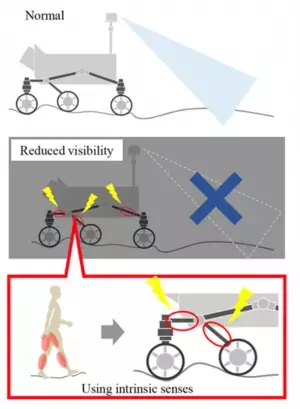
走行状態検出システムの概要
人間の筋肉が身体の走行状態を検知するのと同様に、ローバーのスリップ状態はシャーシの変形を検知することで判断できる(提供:芝浦工業大学 飯塚)
■研究の背景
人類が他の惑星を探査するのに役立っている無人ローバーは、緩い土の上でスリップすることにより、目標進路から外れたり、立ち往生したりすることがあります。
NASAの火星探査ローバーや月探査ローバーは、これら地球外の天体に関する理解に大きく貢献しています。しかし、惑星の表面は斜面、クレーター、砂丘など、多くがローバーの走行にとって過酷な環境です。さらに困難なことに、天体の表面を覆う微粒子(レゴリス)の存在が、ローバーの機動性に大きな問題をもたらしています。
これまで、ローバーの走行状態やスリップ状態を検出するために、主にカメラからの視覚データに頼る様々な方法が検討されてきました。しかし、これらの方法には限界があり、岩と緩い砂を区別するなど、さまざまな地形の質的特徴を区別することが困難です。この問題を解決するには、ローバーが各車輪と地面との間の力のかかり具合(トラクション)に関する情報を取得することが重要です。トラクションの情報を得ることで、ローバーはより速く走行環境を検知し、スリップを避けるために姿勢を修正できるからです。
■研究の概要
飯塚研究室では、シャーシの変形からローバーの走行状態を検知する新しいシステムを開発しました。システム開発の着想は、人間が歩行中の筋肉の張力から自分の走行状態を検出する方法から得たものです。人体の筋肉には、核鎖線維や核袋線維と呼ばれる特殊な筋線維があり、身体の走行状態を検出するのに役立っています。
本研究では、人間の筋肉との類似性を利用して、ひずみとして現れるローバーのシャーシの形状の変化を、ひずみの変位とひずみの振動変化の2つに分類しました。ひずみの変位データを核鎖線維解析で、ひずみ速度を核袋線維解析で調べました。核鎖線維解析により、鉛直方向とローバーの進行方向に働く力がひずみによって変化することが明らかになりました。そのため、ひずみの変位をモニタリングすることで、力の変化を検出することができ、最終的にローバーの走行状態を示すことができるようになりました。さらに、核袋線維の分析を通じて、ひずみの振動変化率が、ローバーの滑りの程度とその後の走行状態の変化を効果的に測定できることを発見しました。
このデータを使用することで、システムはローバーの状態をリアルタイムで判断することができ、潜在的なスリップ事故を回避するために必要不可欠な操作をローバーが行えるようになります。
■今後の展望
本研究では、岩や石などの環境障害物を検出する能力もシステムに組み込まれており、ローバー操作の安全性と効率を高める可能性が示されています。今回の研究成果は、移動する物体のセンシングに生物学的機能の要素を取り入れる有用性を示しています。こうしたアプローチは、将来、無人航空機や自動運転にも有効です。
■研究助成
本研究は、科学研究費補助金(JP21K03952)の助成を受けたものです。
■論文情報
著者 : 芝浦工業大学システム理工学部機械制御システム学科 教授
飯塚 浩二郎
芝浦工業大学大学院システム理工学専攻修了生(2022年度)
稲葉 康平
論文名: Slip Estimation Using Variation Data of Strain of
the Chassis of Lunar Rovers Traveling on Loose Soil
掲載誌: Remote Sensing
DOI :https://doi.org/10.3390/rs15174270
■芝浦工業大学とは
工学部/システム理工学部/デザイン工学部/建築学部/大学院理工学研究科
https://www.shibaura-it.ac.jp/
日本屈指の海外学生派遣数を誇るグローバル教育と、多くの学生が参画する産学連携の研究活動が特長の理工系大学です。東京都と埼玉県に2つのキャンパス(豊洲、大宮)、4学部1研究科を有し、約9,500人の学生と約300人の専任教員が所属。2024年には工学部が学科制から課程制に移行し、従来の教育の在り方を根本から変えていきます。創立100周年を迎える2027年にはアジア工科系大学トップ10を目指し、教育・研究・社会貢献に取り組んでいます。
詳細はこちら
プレスリリース提供元:@Press
この技術は、人間の筋肉が自身の走行状況を検知するために筋肉の張力変位を利用している点に着目して開発されました。無人ローバーを安全に走行させるために、これまでカメラによる視覚データに頼っていた走行状態の検出に、新たな方法の可能性を提供します。
※この研究成果は、「Remote Sensing」誌に掲載されています。
走行状態検出システムの概要
人間の筋肉が身体の走行状態を検知するのと同様に、ローバーのスリップ状態はシャーシの変形を検知することで判断できる(提供:芝浦工業大学 飯塚)
■研究の背景
人類が他の惑星を探査するのに役立っている無人ローバーは、緩い土の上でスリップすることにより、目標進路から外れたり、立ち往生したりすることがあります。
NASAの火星探査ローバーや月探査ローバーは、これら地球外の天体に関する理解に大きく貢献しています。しかし、惑星の表面は斜面、クレーター、砂丘など、多くがローバーの走行にとって過酷な環境です。さらに困難なことに、天体の表面を覆う微粒子(レゴリス)の存在が、ローバーの機動性に大きな問題をもたらしています。
緩い表面でローバーがスリップすると、進行が妨げられ、任務遂行が難しくなります。
これまで、ローバーの走行状態やスリップ状態を検出するために、主にカメラからの視覚データに頼る様々な方法が検討されてきました。しかし、これらの方法には限界があり、岩と緩い砂を区別するなど、さまざまな地形の質的特徴を区別することが困難です。この問題を解決するには、ローバーが各車輪と地面との間の力のかかり具合(トラクション)に関する情報を取得することが重要です。トラクションの情報を得ることで、ローバーはより速く走行環境を検知し、スリップを避けるために姿勢を修正できるからです。
■研究の概要
飯塚研究室では、シャーシの変形からローバーの走行状態を検知する新しいシステムを開発しました。システム開発の着想は、人間が歩行中の筋肉の張力から自分の走行状態を検出する方法から得たものです。人体の筋肉には、核鎖線維や核袋線維と呼ばれる特殊な筋線維があり、身体の走行状態を検出するのに役立っています。
核鎖線維は筋肉の張力の変位を検出し、身体の静止姿勢を判断するのに利用されます。一方、核袋線維は筋線維の伸張速度を検出し、身体の動的状態を検出するのに役立っています。
本研究では、人間の筋肉との類似性を利用して、ひずみとして現れるローバーのシャーシの形状の変化を、ひずみの変位とひずみの振動変化の2つに分類しました。ひずみの変位データを核鎖線維解析で、ひずみ速度を核袋線維解析で調べました。核鎖線維解析により、鉛直方向とローバーの進行方向に働く力がひずみによって変化することが明らかになりました。そのため、ひずみの変位をモニタリングすることで、力の変化を検出することができ、最終的にローバーの走行状態を示すことができるようになりました。さらに、核袋線維の分析を通じて、ひずみの振動変化率が、ローバーの滑りの程度とその後の走行状態の変化を効果的に測定できることを発見しました。
このデータを使用することで、システムはローバーの状態をリアルタイムで判断することができ、潜在的なスリップ事故を回避するために必要不可欠な操作をローバーが行えるようになります。
■今後の展望
本研究では、岩や石などの環境障害物を検出する能力もシステムに組み込まれており、ローバー操作の安全性と効率を高める可能性が示されています。今回の研究成果は、移動する物体のセンシングに生物学的機能の要素を取り入れる有用性を示しています。こうしたアプローチは、将来、無人航空機や自動運転にも有効です。
■研究助成
本研究は、科学研究費補助金(JP21K03952)の助成を受けたものです。
■論文情報
著者 : 芝浦工業大学システム理工学部機械制御システム学科 教授
飯塚 浩二郎
芝浦工業大学大学院システム理工学専攻修了生(2022年度)
稲葉 康平
論文名: Slip Estimation Using Variation Data of Strain of
the Chassis of Lunar Rovers Traveling on Loose Soil
掲載誌: Remote Sensing
DOI :https://doi.org/10.3390/rs15174270
■芝浦工業大学とは
工学部/システム理工学部/デザイン工学部/建築学部/大学院理工学研究科
https://www.shibaura-it.ac.jp/
日本屈指の海外学生派遣数を誇るグローバル教育と、多くの学生が参画する産学連携の研究活動が特長の理工系大学です。東京都と埼玉県に2つのキャンパス(豊洲、大宮)、4学部1研究科を有し、約9,500人の学生と約300人の専任教員が所属。2024年には工学部が学科制から課程制に移行し、従来の教育の在り方を根本から変えていきます。創立100周年を迎える2027年にはアジア工科系大学トップ10を目指し、教育・研究・社会貢献に取り組んでいます。
詳細はこちら
プレスリリース提供元:@Press
この記事もおすすめ

提供: